Deskewing by space-variant deblurring
Karthik Seemakurthy Subeesh Vasu A.N. Rajagopalan
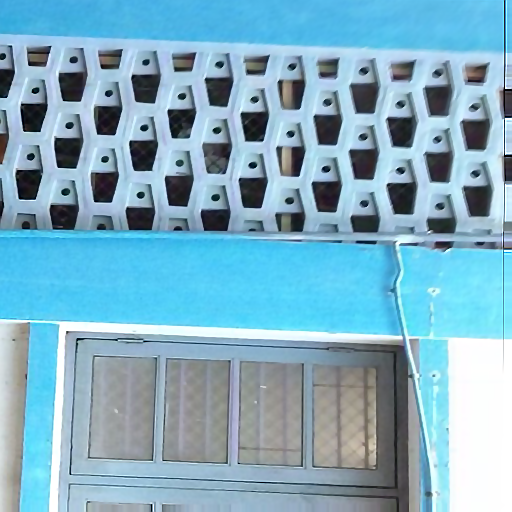
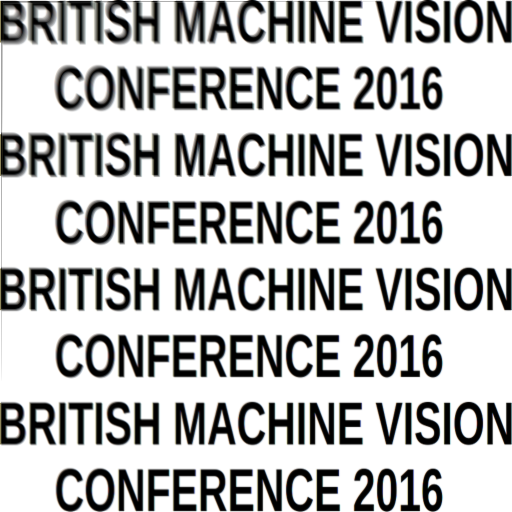
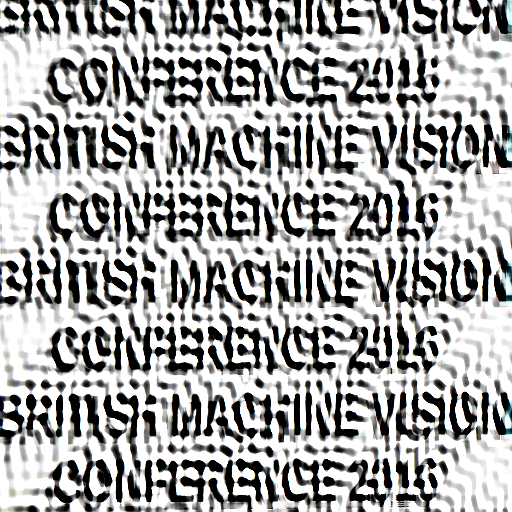
Abstract Skew and motion blur are significant challenges when camera and scene of interest are in two different media. Skew occurs due to spatially varying refraction on a dynamic water surface, whereas motion blur results from multiple intensities impinging on the imaging sensor during camera exposure time due to time varying refraction. In this paper, we introduce the notion of virtual depth map which we assign to a planar scene when observed through a dynamic water surface and transform the deskewing problem into one of space-variant deblurring from a single image within an alternating minimization framework. Since the nature of the virtual depth map can change during exposure due to change in wind properties, we also propose a shot detection framework to identify segments of frames from the captured video which conform to a single virtual depth map. While the overall wave motion can be arbitrary, within each segment the nature of wave is modeled as an exponentially decaying periodic wave. Examples Synthetic
Real
Technical Paper, Supplementory, and Poster
|